
Blog
-

I / F öwrüliş moduly näme
I / F öwrüliş zynjyry, analog toky impuls ýygylygyna öwürýän tok / ýygylyk öwrüliş zynjyrydyr. I / F öwrüliş zynjyry, anany öwürýän tok / ýygylyk öwrüliş zynjyry ...Dowamyny oka -
Inertial ölçeg bölüminiň (IMU) datçikleriniň goşundylary
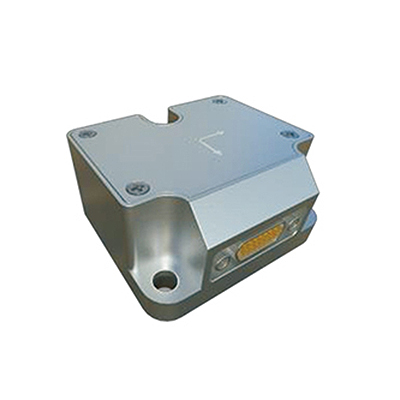
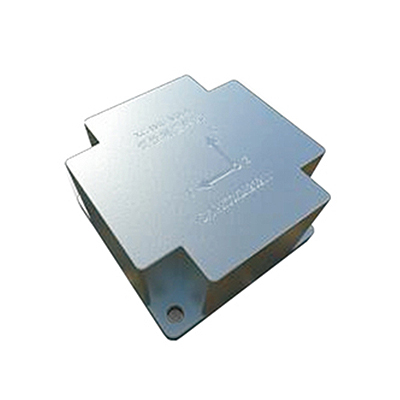
Inertial ölçeg birligi (IMU) üç okly garaýyş burçuny (ýa-da burç tizligini) we obýektiň tizlenmesini ölçemek üçin ulanylýan enjamdyr. IMU-nyň esasy enjamlary giroskop we akselerometrdir. W ...Dowamyny oka -
Gatnaşyk ulgamy näme?
Gatnaşyk ulgamy, ulagyň (uçar ýa-da kosmos gämisi) sözbaşysyny (sözbaşysyny) we garaýşyny (meýdançasy we meýdançasy) kesgitleýän we awtomatiki dolandyryş ulgamyna we nawigasiýa sözbaşy we garaýyş signallaryny berýän ulgam ...Dowamyny oka -
Inertial ölçeg bölümi nawigasiýa ulgamlaryny rewolýusiýa edýär
Inertial ölçeg birlikleri (IMU), pudaklarda nawigasiýa ulgamlaryny özgertýän öňdebaryjy tehnologiýa öwrüldi. Giroskoplary, akselerometrleri we magnitometrleri öz içine alýan bu enjamlar hereketi we ugry yzarlamakda görlüp-eşidilmedik takyklygy we ygtybarlylygy üpjün edýär. Integr boýunça ...Dowamyny oka -
Toplumlaýyn inertial nawigasiýa: nawigasiýa tehnologiýasynda öwrülişik
Esasy ösüşde gözlegçiler toplumlaýyn inertial nawigasiýa ulgamyny ornaşdyrmak arkaly nawigasiýa tehnologiýasynda üstünlik gazandylar. Bu ynkylap öňe gidişligi, köp bil baglaýan pudaklara takyklygy, takyklygy we ygtybarlylygy getirip, ýolumyzy täzeden kesgitlemegi wada berýär ...Dowamyny oka -
Üç okly giroskop deňsiz-taýsyz takyklyk we netijelilik bilen nawigasiýa we robotlary özgertýär
Esasy ösüşlerde, häzirki zaman üç okly giroskoplar, nawigasiýa we robot önümçiliginiň täze serhedi hökmünde ýüze çykdy, deňsiz-taýsyz takyklygy we netijeliligi görkezip, dürli pudaklarda rewolýusiýa etmegi wada berýär. Öňdebaryjy tehnologiýany we häzirki zaman in engineeringenerçiligini birleşdirmek ...Dowamyny oka